
Voxel Point Cloud
ThisA Voxel Point Cloud entity convertstransforms a seriescollection of spherical point cloud capturescaptures—often from mobile or static LiDAR devices—into a singleunified, volumetric voxel model. This format is ideal for analyzing spatial density and structure within 3D environments.
OnceCreating youa Voxel Point Cloud
- In your project’s Catalog, click the “Add Object” button and select “Voxelized Points” from the
“Add”dropdownmenu,menu.
|
|
|
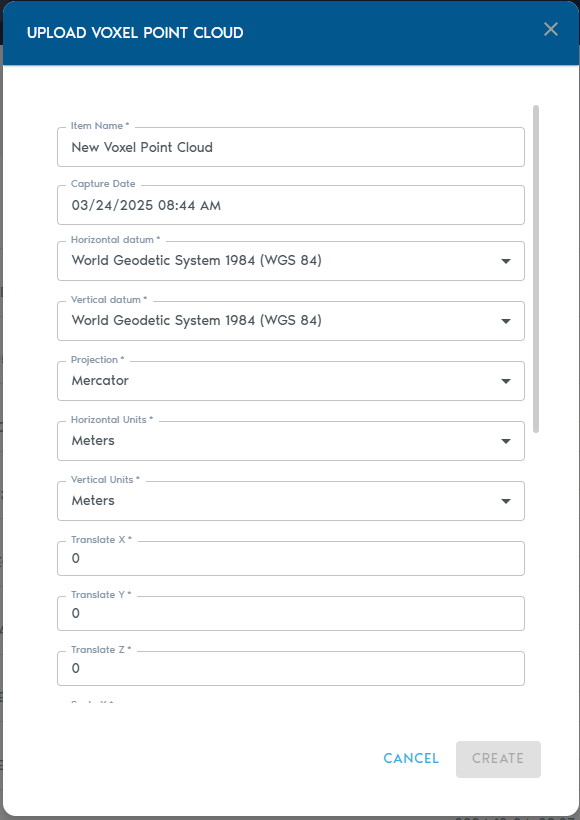
2. Fill in the following metadata:
|
Field |
Description
|
|
Item Name |
A
|
|
Capture Device |
|
|
Capture Date |
|
|
Horizontal Datum |
|
|
Vertical Datum |
|
|
Projection |
|
|
Horizontal Units |
|
|
Vertical Units |
|
|
|
|
|
|
|
|
|
|
|
|
|
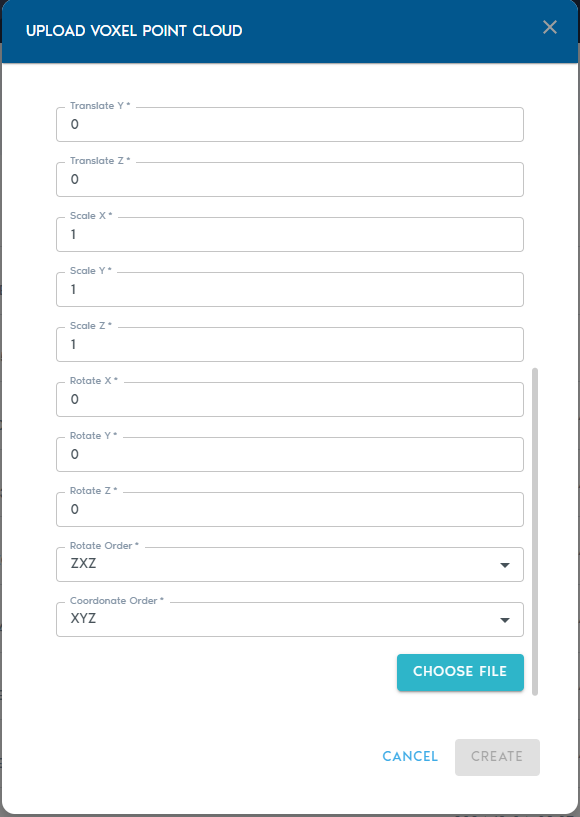
Rotation Order |
Defines the sequence in which rotations are applied (e.g., XYZ, ZYX). |
Once
Uploading havethe providedData
- Click
these fields, click on“Choose Files”.Thistowilluploadpromptyourapointfilecloudselectiondata. - Each file must
containbe asequencecomma-separated list ofcomma-separatedXYZvalues,values,wherewhere: - The first entry in the
firstfileentry containsrepresents thecoordinateslocation of the scanning device - All
LiDARsubsequentdevice for instance) and the remaining pointsentries arethepointsthat werecaptured from thatlocation.location
You may select and upload multiple files in a single batch.
Finalizing the Upload
Click on “Create” to beginstart the uploadvoxelization and voxelizationupload process.
You can trackmonitor the upload operation from the “Pending” sectionprogress in the project’s“Pending” page.section of the project interface.
Once complete, the voxel model will be available for viewing and integration within your project.